Robotic Image Plotter
- Image and contour filtering in Python using OpenCV
- Implemented Douglas-Peucker recursive point reduction algorithm to simplify contours
- Developed PID loop in C from scratch equiped with a low pass filter
- Designed rack and pinion two axis gantry
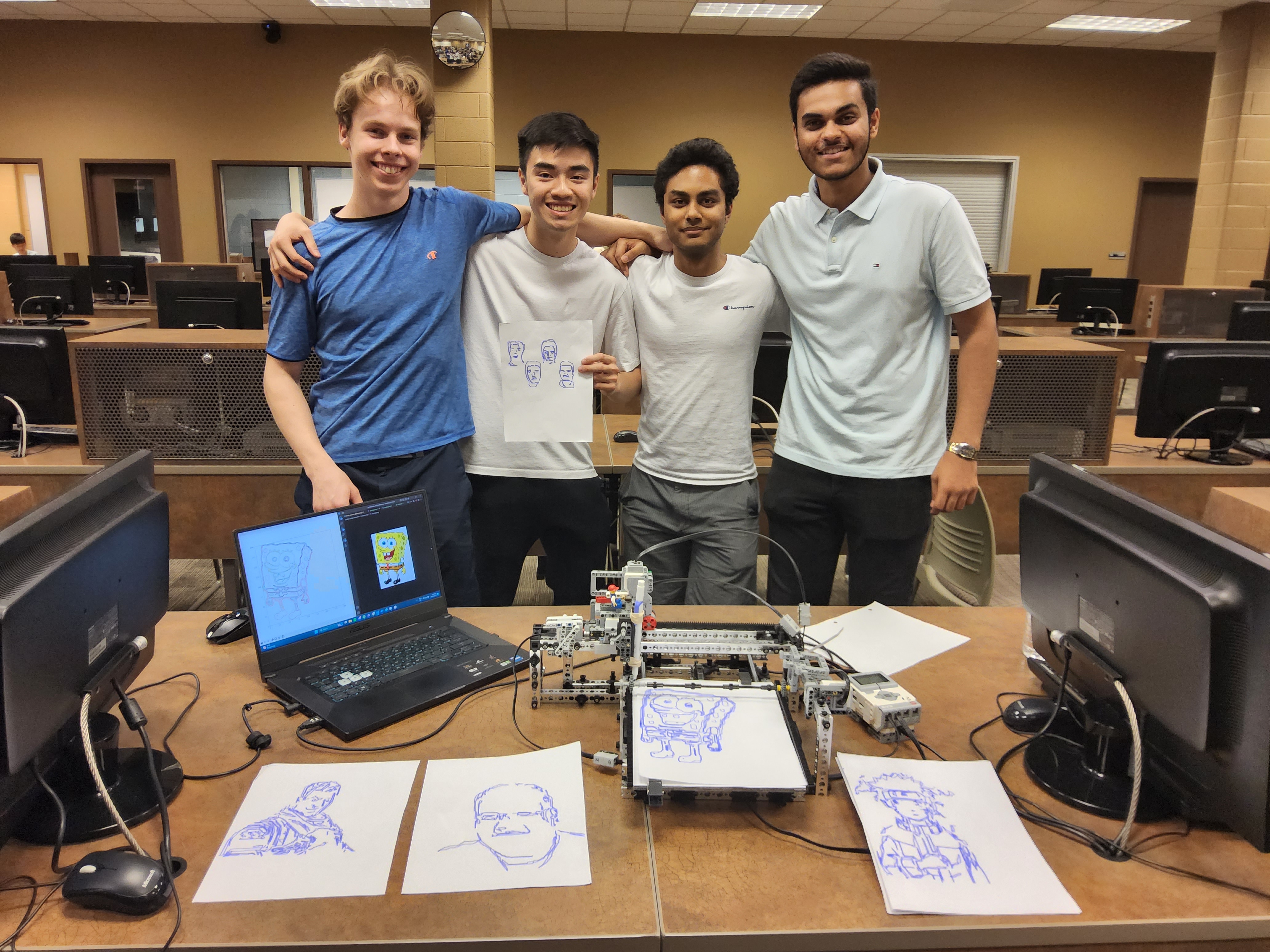
Articus Maximus is a two axis gantry drawing robot, engineered to translate digital images into
intricate line art drawings. I worked in a group of four to develop Articus Maximus for my final project
for my 1B term.
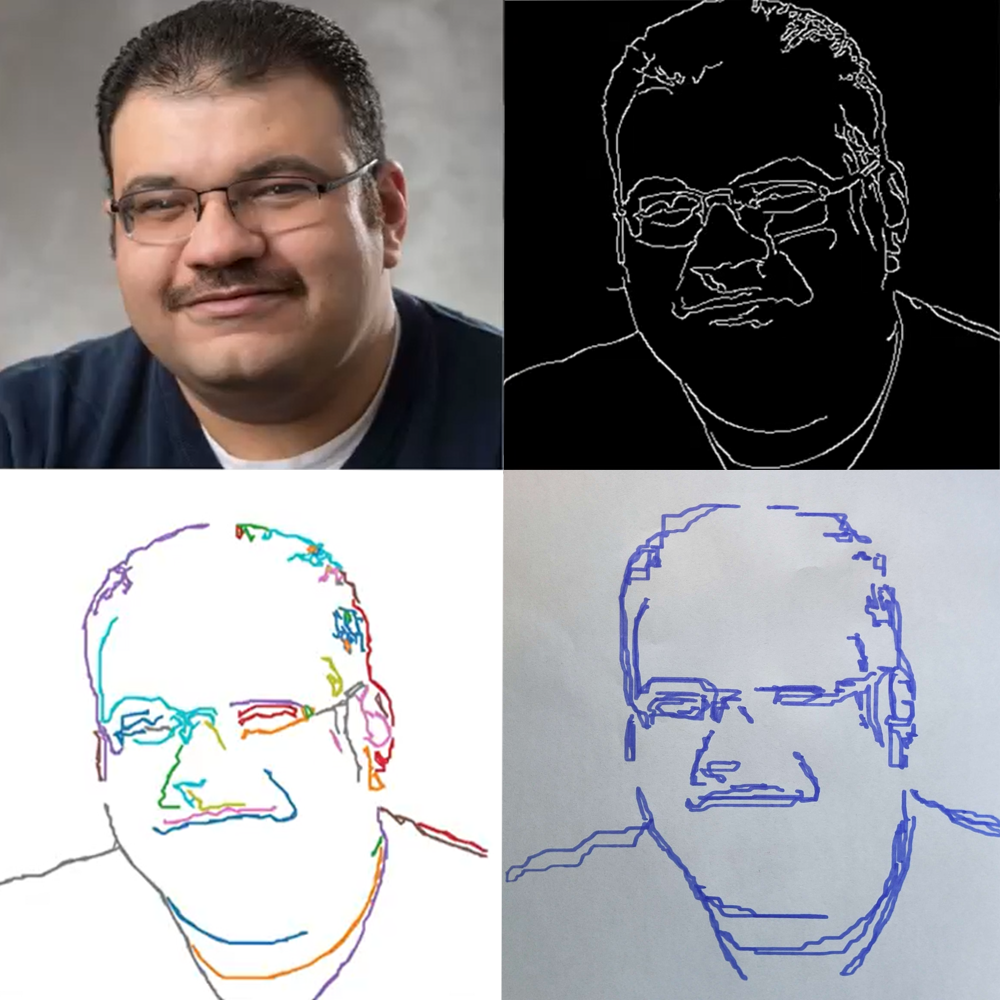
First, using OpenCV we performed edge and contour detection on an input image, finding the outline of all the objects
present. We then removed redundant points, lines and contours using an implementation of Douglas-Peucker's Algorithm
and Hu Moments. The plotter then draws point to point using a PID controller that was programmed from scratch.
I would like to thank Professor Mohammed Nassar, whose portrait was used for the pictures above.
